総合実習(1年生)
1年生総合実習でした。
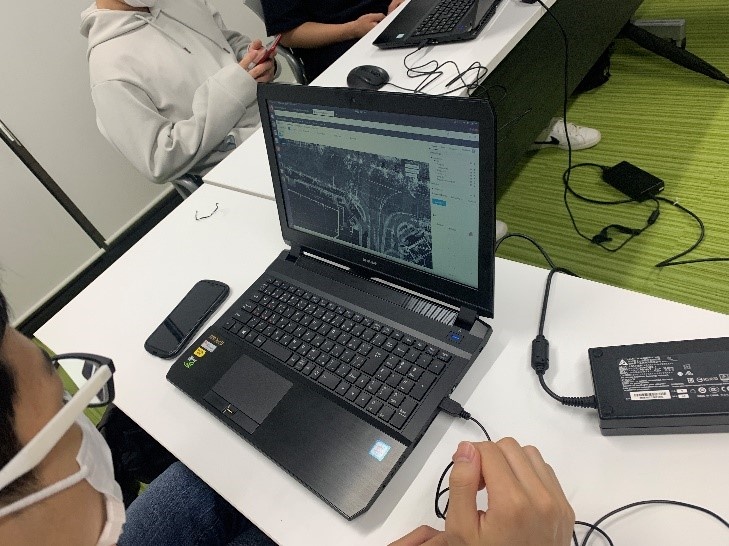
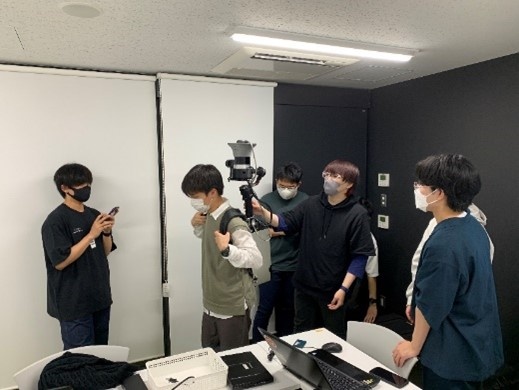
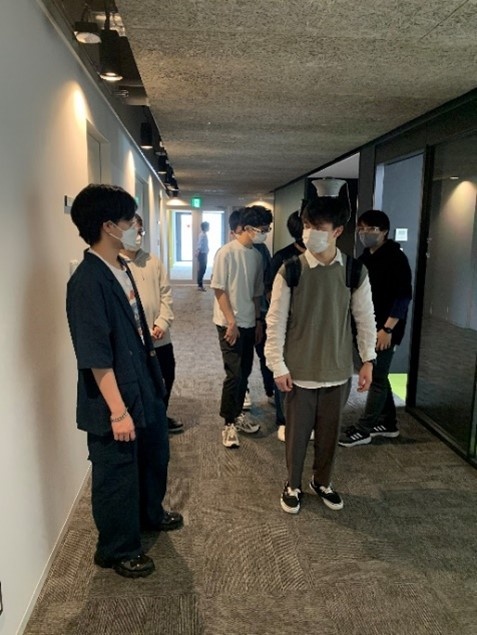
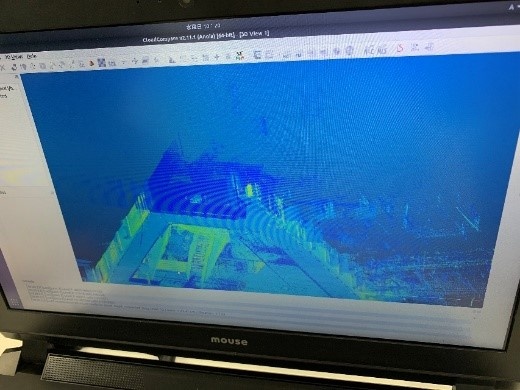
「自動運転支援用プレビューセンサー開発と実践Ⅰ」班は、名古屋大学にて本大学のスタートアップ企業であるMAP Ⅳ(マップフォー)殿の協力を頂き、建物内の地図を作る手法の習得を開始しました。講師は専攻科2回生で名大に就職された楮原さんです。本方法の原理は「スラムSLAM(Simultaneous Localization and Mapping)」と呼ばれる方法で、Lidarから得られたデータに後処理などを実施する事で、3次元の地図が得られます。先週、シームスSEAMSと呼ばれるLidarが搭載された装置を背負い地図を作成する通路を歩いてデータを取得し、3次元地図を得ました。今週から東京西新宿のLidarデータからベクターマップと呼ばれる道路データを作る手法を体得しだしました。