2019/11/27
総合実習Ⅰ
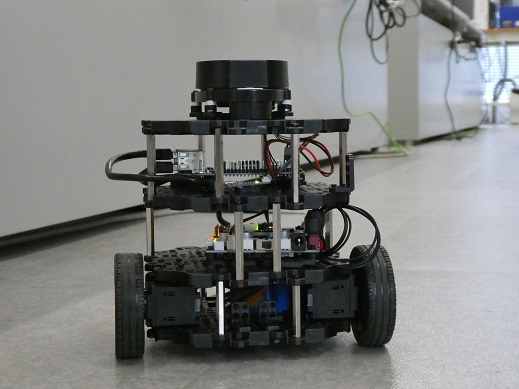
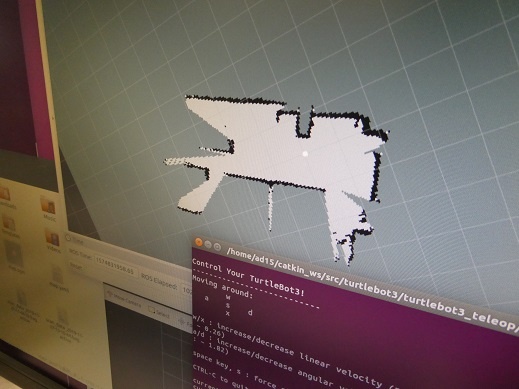
1年生総合実習Ⅰで「自動運転支援用 プレビューセンサの開発と実践Ⅰ」をテーマとするチームでは、移動ロボットの自己位置推定と高精度地図の作製に関する技術について学んでいます。後期からTurtlebot3を題材に二次元地図の作製に取りかかりました。今年度中にこの地図を元に自律走行を実現することを目標としています。
一覧に戻る